
Équipe SEACom : Systèmes embarqués, acoustique et communications

Responsable d’équipe :
Pierre-Jean BOUVET (Dr, HDR)
Enseignant-chercheur
pierre-jean.bouvet@isen-ouest.yncrea.fr
Nombre de permanents : 5
Nombre de doctorants : 3
Mots clés :
- Acoustique Sous-Marine
- Électronique de Conditionnement du Capteur
- Communications Numériques Sous-Marines
- Positionnement Sous-Marin
- Traitement du Signal
- Électronique Embarquée
- Navigation
- Filtrage Bayésien
- Observatoires Marins
- Sous-Marins
Projet de recherche
Algorithmes et systèmes embarqués pour les télécommunications et le positionnement en milieu marin
Axes de recherche
Communications sous-marines sans fils
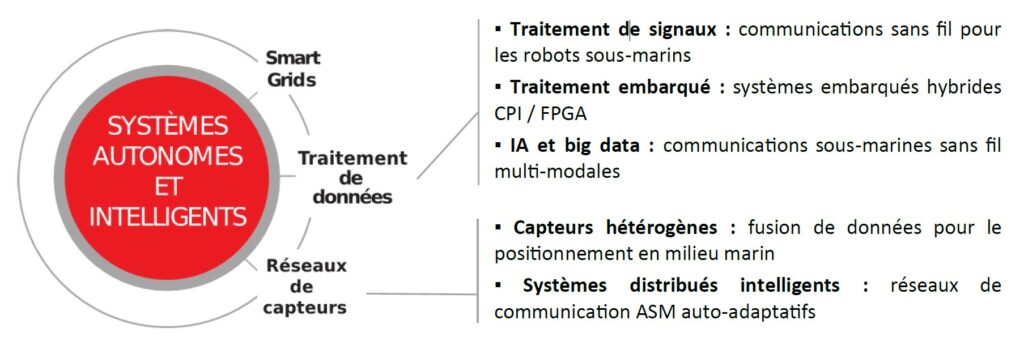
Le milieu sous-marin n’est pas favorable à la transmission radio conventionnelle. En se basant sur les ondes acoustiques et/ou optiques, l’équipe étudie des nouveaux systèmes de communication utilisant des capteurs multiples, de l’intelligence artificielle, des formes d’ondes innovantes pour réaliser des transmissions fiables, optimisant l’efficacité spectrale, et permettant à plusieurs émetteurs de coexister au sein d’un même spectre. L’équipe étudie également les systèmes de communications hybrides utilisant plusieurs modes de communication (ondes optiques, acoustiques ou radio). Les applications visées concernent les réseaux sous-marins sans fils (UWSN) ou les flottes de drones sous-marins autonomes (AUVs).
Positionnement sous-marin
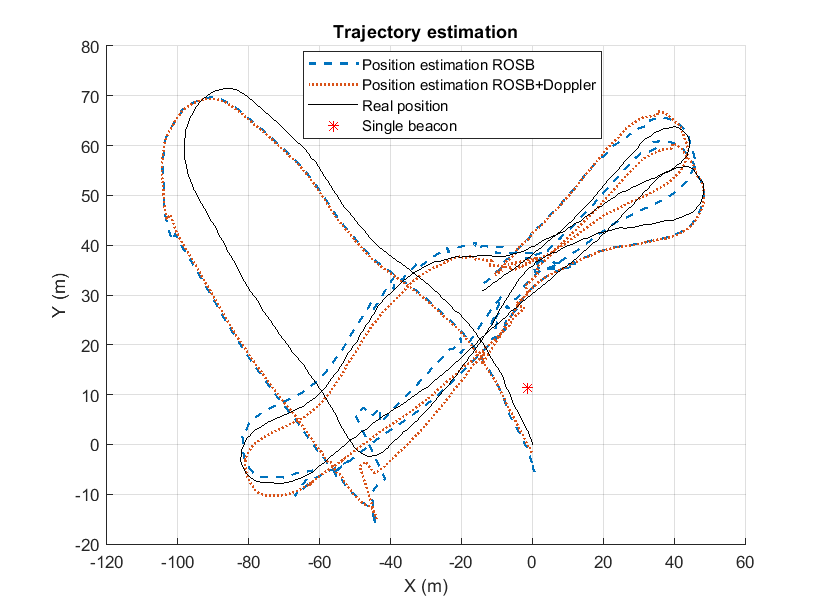
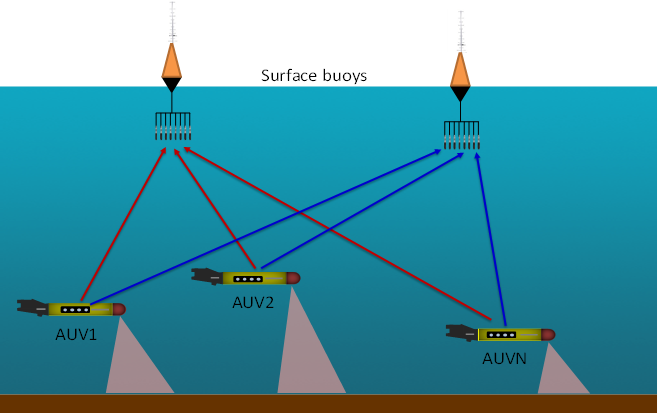
Du fait du phénomène d’absorption, les ondes radioélectriques ne se propagent dans le milieu sous-marin que pour les faibles fréquences (ELF, VLF,…), ce qui rend les systèmes de localisation (GNSS) inopérants au-delà d’une distance de quelques dizaines de centimètres. Les systèmes de positionnement actuels, basés principalement sur les ondes acoustiques, calculent une position en fusionnant les informations provenant de plusieurs capteurs (INS, DVL,…) ainsi que par triangulation avec plusieurs balises de références (LBL, GiB, …). L’équipe étudie des solutions de positionnement utilisant de façon opportuniste les données de communications acoustiques (synchronisation, estimation de l’effet Doppler) afin de minimiser le nombre de capteurs embarqués et par voie de conséquence l’encombrement et le prix du système. Les applications visées sont les essaims de micro AUVs.
Membres de l’équipe





Publications récentes
Dernière mise à jour : mai 2023